Uzayda Doğru
İki boyutlu kartezyen düzlemindeki doğrunun denklemini \( ax + by + c = 0 \) olarak görmüştük. Bu formdaki bir denklemde her \( x \) değeri için bir \( y = f(x) \) değeri hesaplanır ve oluşan tüm \( (x, y = f(x)) \) noktaları koordinat düzleminde bir doğru oluşturur.
İlk bakışta üç boyutlu uzaydaki doğrunun denkleminin \( ax + by + cz + d = 0 \) olacağını düşünebiliriz. Ancak bu formdaki bir denklemde her \( x \) değeri için \( yz \) düzleminde bir doğruya karşılık gelen \( by + cz + k = 0 \) formunda bir denklem elde edilir ve oluşan tüm \( (x, y, z) \) noktaları bir doğru değil düzlem oluşturur.
Bu bölümde üç boyutlu uzaydaki doğrunun farklı denklem formlarını inceleyeceğiz.
Uzayda Doğru Denklemi
Bir \( L \) doğrusunun denklemini bulmak için, önce bu doğru üzerinde bir \( P_0 \) noktası ve doğruya paralel bir \( \vec{d} \) konum vektörü tanımlayalım. \( L \) doğrusunun doğrultusunu gösteren bu \( \vec{d} \) vektörüne doğrultman vektörü ya da doğrultu vektörü denir.
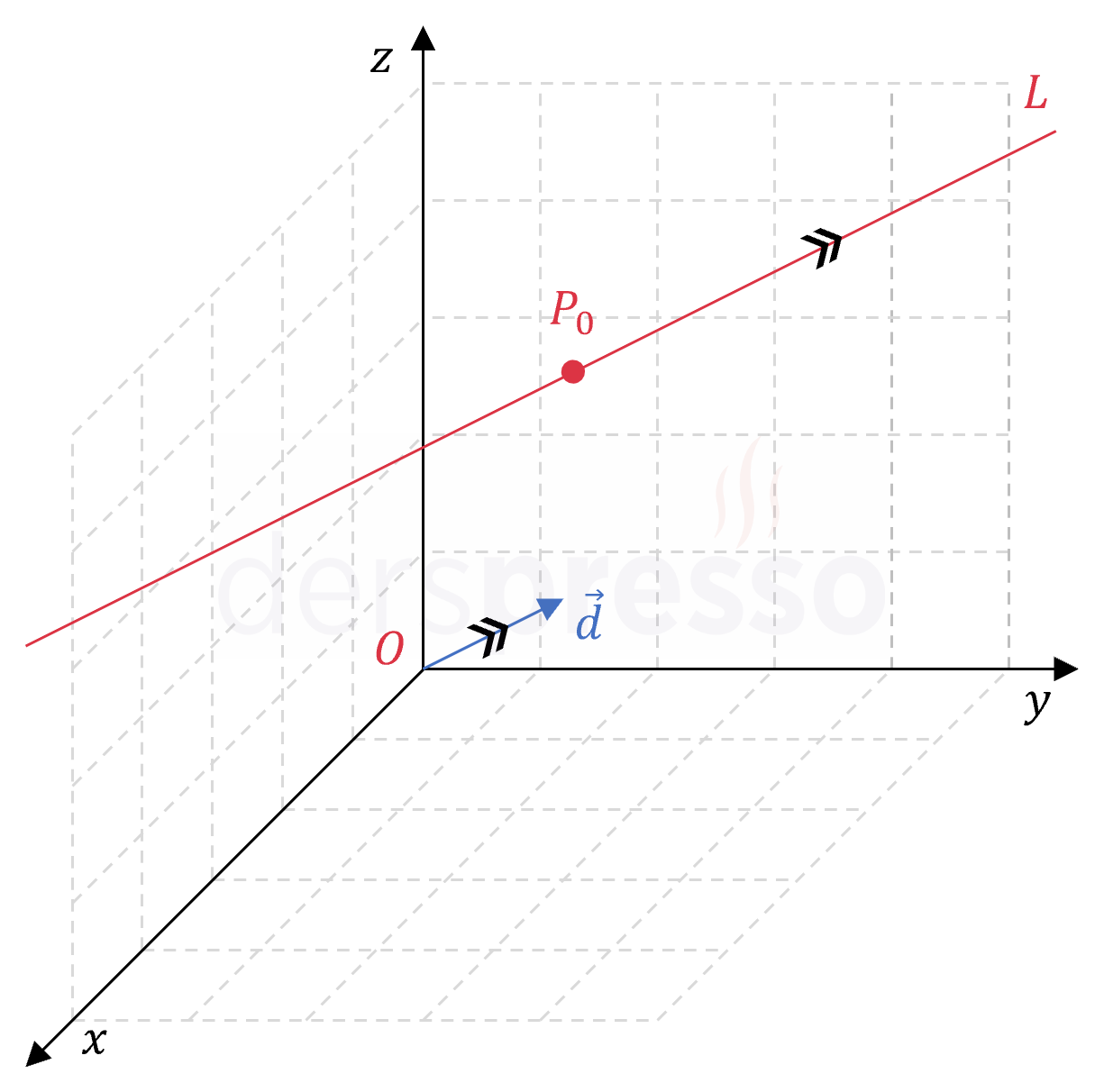
\( P_0(x_0, y_0, z_0) \)
\( \vec{d} = (a, b, c) \)
\( P_0 \) noktası ve \( \vec{d} \) vektörünü kullanarak \( L \) doğrusunun denklemini bulalım.
Doğrunun Vektör Denklemi
\( L \) doğrusu üzerinde herhangi bir \( P \) noktası seçelim. \( P_0 \) ve \( P \) noktaları için konum vektörleri sırasıyla \( \vec{r_0} \) ve \( \vec{r} \) olsun.
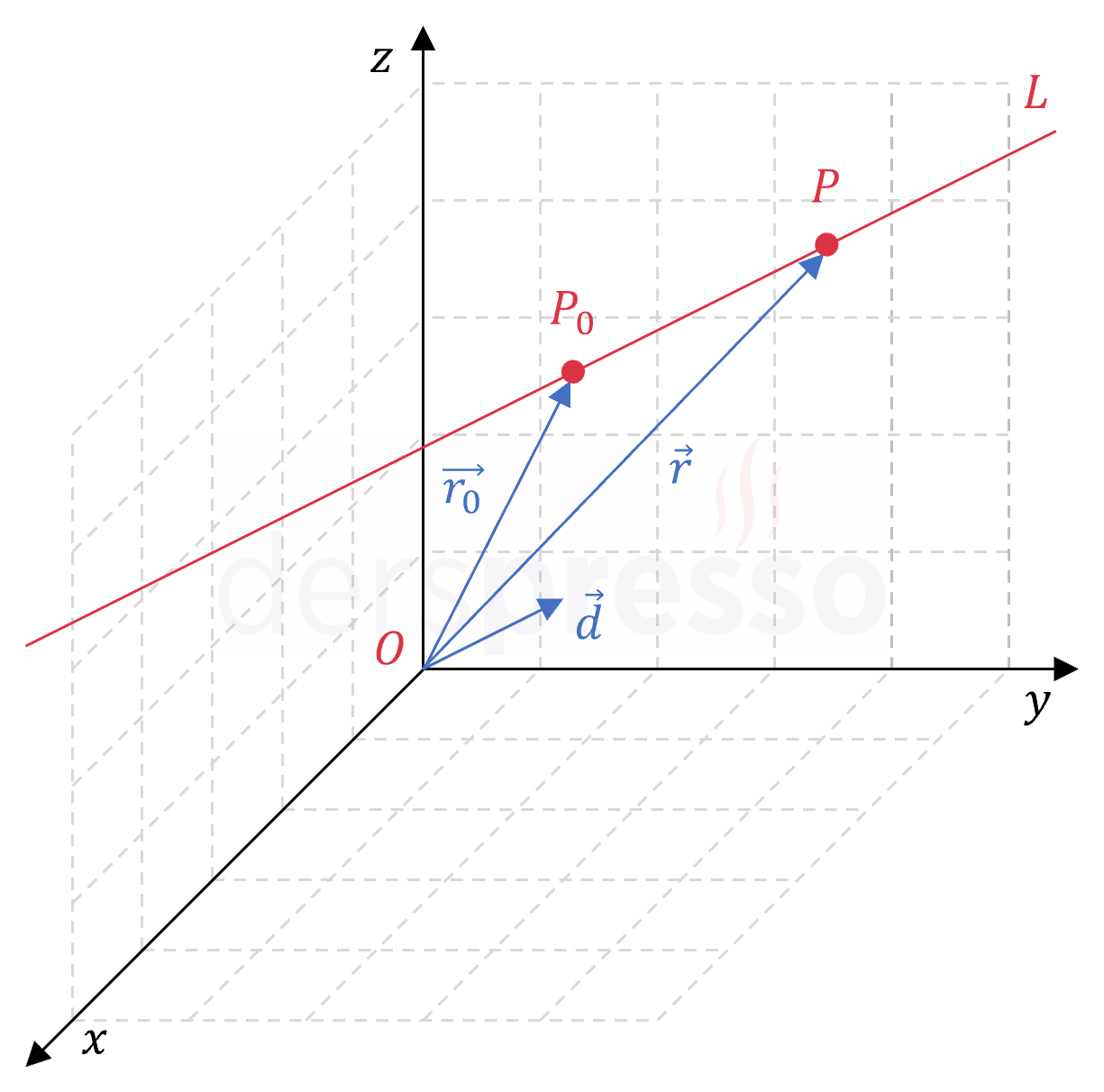
\( P(x, y, z) \)
\( \vec{r_0} = (x_0, y_0, z_0) \)
\( \vec{r} = (x, y, z) \)
\( \vec{r} \) vektörünü iki vektörün toplamı şeklinde yazabiliriz.
\( \vec{a} = \vec{P_0P} = P - P_0 \) olmak üzere,
\( \vec{r} = \vec{r_0} + \vec{a} \)
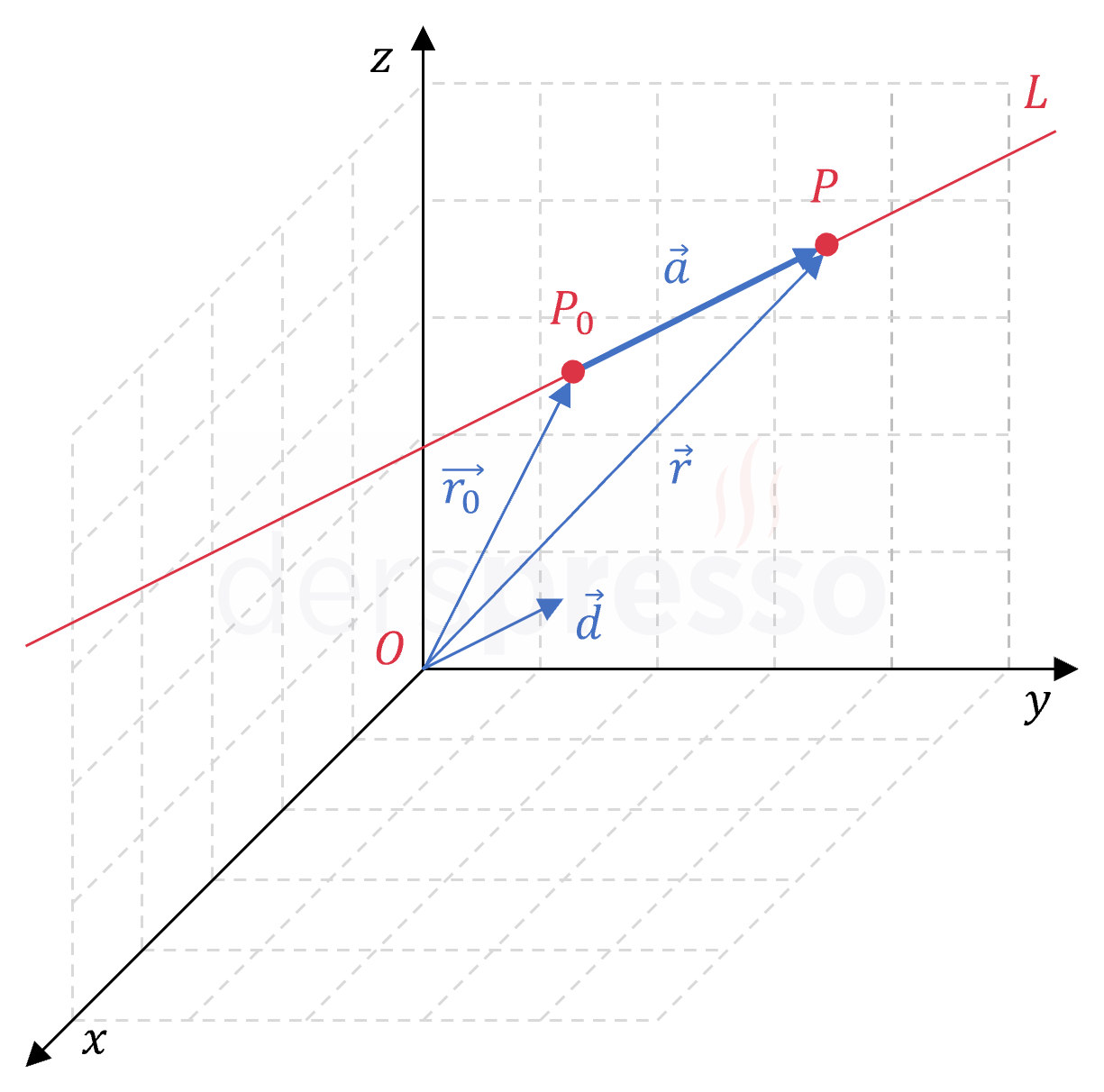
\( L \) doğrusu \( \vec{d} \) vektörüne paralel olduğu için, doğrultusu \( L \) ile aynı olan \( \vec{a} \) vektörü de \( \vec{d} \) vektörüne paraleldir, dolayısıyla \( \vec{a} \) vektörünü \( \vec{d} \) vektörünün bir skaler ile çarpımı şeklinde yazabiliriz.
\( t \in \mathbb{R} \) olmak üzere,
\( \vec{a} = t\vec{d} \)
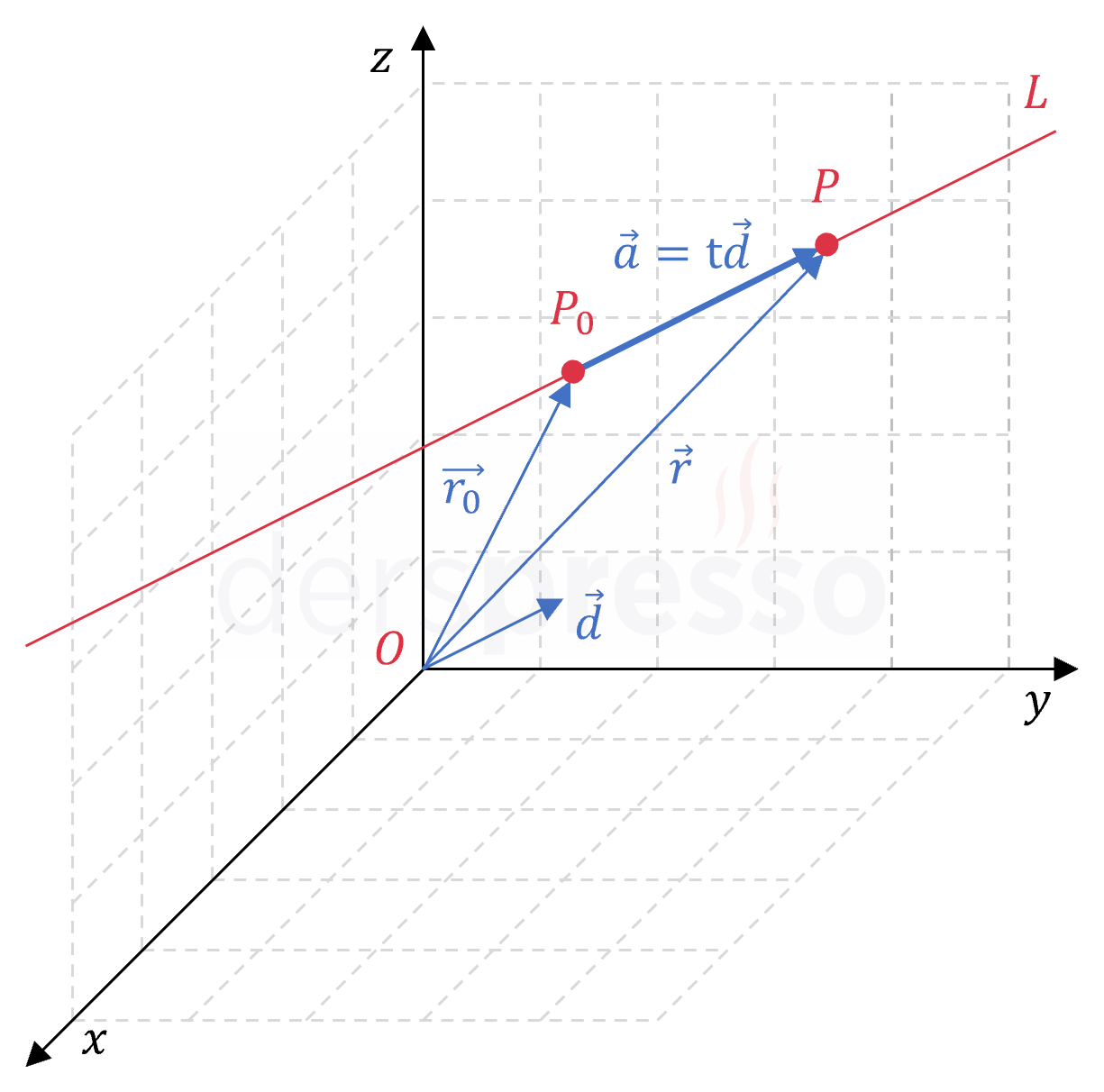
\( \vec{a} \) vektörü yerine \( \vec{d} \) vektörü cinsinden karşılığını yazdığımızda, bir noktası ve doğrultusu bilinen doğrunun vektör denklemi elde edilir.
\( P_0(x_0, y_0, z_0) \) noktasından geçen ve \( \vec{d} = (a, b, c) \) vektörüne paralel olan doğrunun vektör denklemi:
\( t \in \mathbb{R} \) olmak üzere,
\( \vec{r} = \vec{r_0} + t\vec{d} \)
\( (x, y, z) = (x_0, y_0, z_0) + t(a, b, c) \)
\( P_0(1, 2, 3) \) noktasından geçen ve \( \vec{d} = (-1, 2, 1) \) vektörüne paralel olan doğrunun vektör denklemi:
\( \vec{r} = (x, y, z) = (1, 2, 3) + t(-1, 2, 1) \)
Bu doğru denklemine göre, farklı \( t \) değerleri için elde edilen \( \vec{r} \) konum vektörleri üç boyutlu uzayda bir doğru oluşturur.
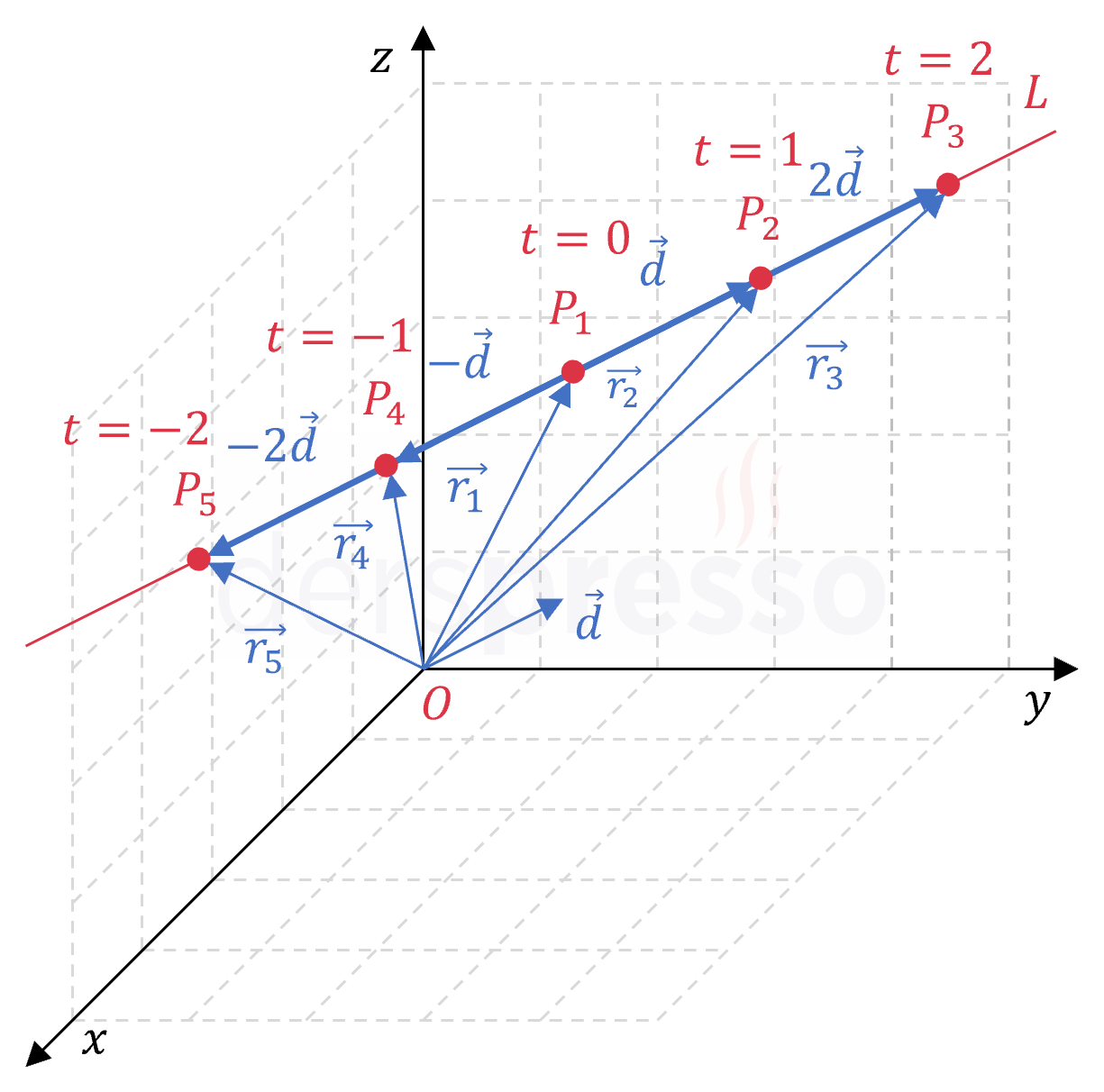
Yukarıdaki örnekteki doğru üzerindeki noktaları \( t \) değişkenine farklı değerler vererek bulabiliriz.
\( A(1, 2, 3) \) noktasından geçen ve \( \vec{d} = (-1, 2, 1) \) vektörüne paralel olan doğru üzerindeki bazı noktalar:
\( \vec{r_1} = (1, 2, 3) + 0(-1, 2, 1) = (1, 2, 3) \)
\( \vec{r_2} = (1, 2, 3) + 1(-1, 2, 1) = (0, 4, 4) \)
\( \vec{r_3} = (1, 2, 3) + 2(-1, 2, 1) = (-1, 6, 5) \)
\( \vec{r_4} = (1, 2, 3) + -1(-1, 2, 1) = (2, 0, 2) \)
\( \vec{r_5} = (1, 2, 3) + -2(-1, 2, 1) = (3, -2, 1) \)
Her ne kadar eğim sadece iki boyutlu düzlem için geçerli bir kavram olsa da, düzlemdeki ve uzaydaki doğru denklemleri arasında aşağıdaki gibi bir benzerlik kurulabilir.
Düzlemde doğru: \( y = c + mx \)
Uzayda doğru: \( \vec{r} = \vec{r_0} + \vec{d}t \)
Buna göre;
- Düzlemde bir doğrunun "başlangıç" noktası olarak doğrunun \( y \) eksenini kestiği \( (0, c) \) noktası kabul edilirse doğrunun \( y \) değeri \( x \) değerindeki her birim artış/azalış için doğrunun "yönünü" belirleyen \( m \) değeri kadar artar/azalır.
- Benzer şekilde, uzayda bir doğrunun başlangıç noktası olarak \( P_0 \) noktası kabul edilirse \( t \) değerindeki her birim artış/azalış için doğru \( \vec{d} \) vektörü yönünde ve büyüklüğünde ilerler.
Doğrunun vektör denkleminde \( P_0 \) noktası olarak doğru üzerindeki herhangi bir nokta, doğrultman vektörü olarak da doğruya paralel olan herhangi bir vektör seçilebilir. Buna göre, bir doğrunun vektör denkleminde doğrultman vektörü (sıfır hariç) pozitif ya da negatif herhangi bir skaler ile çarpıldığında ve/veya başlangıç vektörü doğrultman vektörünün herhangi bir skaler çarpımı ile toplandığında yine aynı doğruya ait bir denklem elde edilir.
Buna göre aşağıdaki üç denklem aynı doğruyu ifade eder, aralarındaki fark doğru üzerindeki belirli bir noktanın her denklemde farklı bir \( t \) değerinde oluşmasıdır.
\( \vec{r} = (1, 2, 3) + t(1, 1, 1) \)
\( t = -1 \Longrightarrow P(0, 1, 2) \)
\( \vec{r} = (4, 5, 6) + t(-1, -1, -1) \)
\( t = 4 \Longrightarrow P(0, 1, 2) \)
\( \vec{r} = (-10, -9, -8) + t(2, 2, 2) \)
\( t = 5 \Longrightarrow P(0, 1, 2) \)
Doğrunun Parametrik Denklemi
Doğrunun vektör denklemindeki bileşenler \( x \), \( y \) ve \( z \) için ayrı birer denklem olarak yazıldığında doğrunun \( t \) parametresine bağlı parametrik denklemi elde edilir.
\( P_0(x_0, y_0, z_0) \) noktasından geçen ve \( \vec{d} = (a, b, c) \) vektörüne paralel olan,
\( (x, y, z) = (x_0, y_0, z_0) + t(a, b, c) \) doğrusunun parametrik denklemi:
\( x = x_0 + at \)
\( y = y_0 + bt \)
\( z = z_0 + ct \)
\( A(-2, 1, 4) \) noktasından geçen ve \( \vec{d} = (2, -3, 1) \) vektörüne paralel olan doğrunun vektör denklemi:
\( (x, y, z) = (-2, 1, 4) + t(2, -3, 1) \)
Aynı doğrunun parametrik denklemi:
\( x = -2 + 2t \)
\( y = 1 - 3t \)
\( z = 4 + t \)
Dikkat edilirse doğrunun parametrik denkleminde \( t \) parametresinin katsayıları doğrunun doğrultman vektöründen, sabit terimler de başlangıç noktasından gelmektedir.
\( P_0 \) noktasının ya da \( \vec{d} \) vektörünün herhangi bir bileşeni 0 ise parametrik denklemde ilgili katsayı 0 olur.
\( A(3, 0, 4) \) noktasından geçen ve \( \vec{d} = (-2, 5, 0) \) vektörüne paralel olan doğrunun vektör denklemi:
\( (x, y, z) = (3, 0, 4) + t(-2, 5, 0) \)
Aynı doğrunun parametrik denklemi:
\( x = 3 - 2t \)
\( y = 0 + 5t = 5t \)
\( z = 4 + 0t = 4 \)
Doğrunun Simetrik Denklemi
Doğrunun parametrik denklemlerinde \( t \) parametresi yalnız bırakılarak üç denklem birbirine eşitlendiğinde doğrunun simetrik (ya da bir diğer ifadeyle kartezyen) denklemi elde edilir. Doğrunun simetrik denklemi \( t \) parametresi içermez.
\( \dfrac{x - x_0}{a} = \dfrac{y - y_0}{b} = \dfrac{z - z_0}{c} ( = t) \)
\( A(2, -3, 1) \) noktasından geçen ve \( \vec{d} = (2, 1, -5) \) vektörüne paralel olan doğrunun vektör denklemi:
\( (x, y, z) = (2, -3, 1) + t(2, 1, -5) \)
Aynı doğrunun parametrik denklemi:
\( x = 2 + 2t \)
\( y = -3 + t \)
\( z = 1 - 5t \)
Aynı doğrunun simetrik denklemi:
\( \dfrac{x - 2}{2} = \dfrac{y + 3}{1} = \dfrac{z - 1}{-5} \)
Dikkat edilirse doğrunun simetrik denkleminde paydadaki değerler doğrunun doğrultman vektöründen, paydaki sabit terimler de başlangıç noktasından gelmektedir.
Doğrultman vektörünün herhangi bir bileşeni sıfır ise ilgili değişken \( t \) değişkenine bağlı değişmediği için doğrunun simetrik denkleminde parametrik denklemde olduğu gibi sabit terim olarak tanımlanır.
\( A(1, 5, -4) \) noktasından geçen ve \( \vec{d} = (3, 0, -1) \) vektörüne paralel olan doğrunun vektör denklemi:
\( (x, y, z) = (1, 5, -4) + t(3, 0, -1) \)
Aynı doğrunun parametrik denklemi:
\( x = 1 + 3t \)
\( y = 5 \)
\( z = -4 - t \)
Aynı doğrunun simetrik denklemi:
\( \dfrac{x - 1}{3} = \dfrac{z + 4}{-1}, \quad y = 5 \)
\( x \) eksenini bir doğru olarak düşündüğümüzde vektör ve parametrik denklemleri aşağıdaki gibi olur. Benzer denklemler \( y \) ve \( z \) eksenleri için de yazılabilir.
\( x \) ekseninin vektör denklemi:
\( \vec{x} = (0, 0, 0) + t(1, 0, 0) \)
\( x \) ekseninin parametrik denklemi:
\( x = t, \quad y = z = 0 \)
2 Noktası Bilinen Doğrunun Denklemi
Farklı iki noktası bilinen düzlemin denklemi aşağıdaki yöntemle bulunabilir.
- 2 noktaya ait konum vektörlerinin farkı olan vektör bulunur. Bu vektör aynı zamanda doğrunun doğrultman vektörüdür.
- 2 noktadan herhangi biri kullanılarak, bir noktası ve doğrultman vektörü bilinen doğru denklemi yazılır.
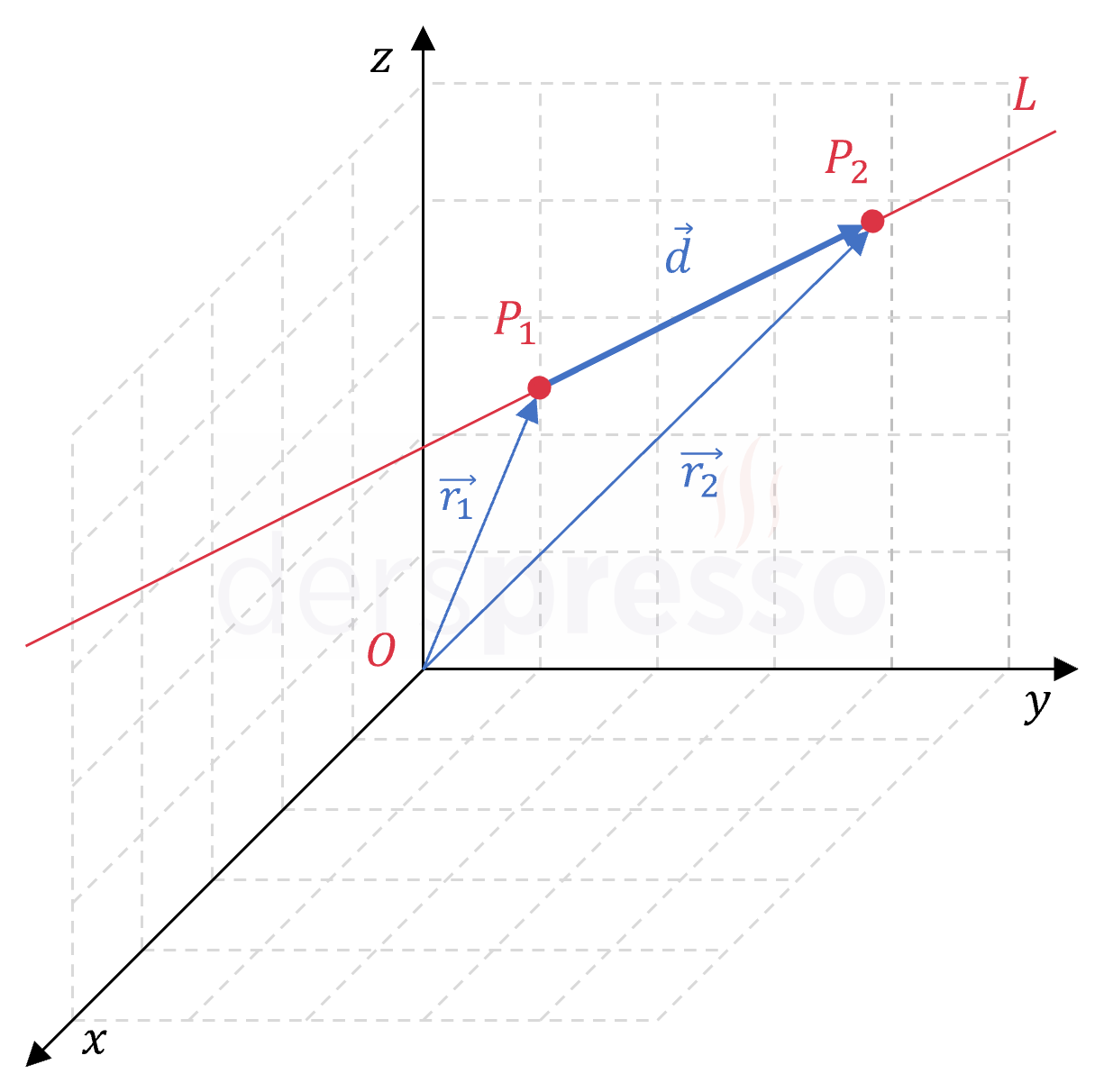
\( P_1 \) ve \( P_2 \) noktalarına ait konum vektörleri sırasıyla \( \vec{r_1} \) ve \( \vec{r_2} \) olmak üzere,
\( \vec{d} = \vec{r_2} - \vec{r_1} \)
\( \vec{r} = \vec{r_1} + t\vec{d} \)
\( P_1(-1, 2, 1) \) ve \( P_2(0, 5, -1) \) noktalarından geçen doğrunun denklemini bulalım.
Doğrunun doğrultman vektörü:
\( \vec{d} = (0 - (-1), 5 - 2, -1 - 1) \)
\( = (1, 3, -2) \)
Doğrunun vektör denklemi:
\( \vec{r} = (-1, 2, 1) + t(1, 3, -2) \)
Doğru Parçasının Denklemi
Uzayda verilen farklı \( P_1 \) ve \( P_2 \) noktalarını birleştiren \( [P_1P_2] \) doğru parçasının denklemi aşağıdaki yöntemle bulunabilir.
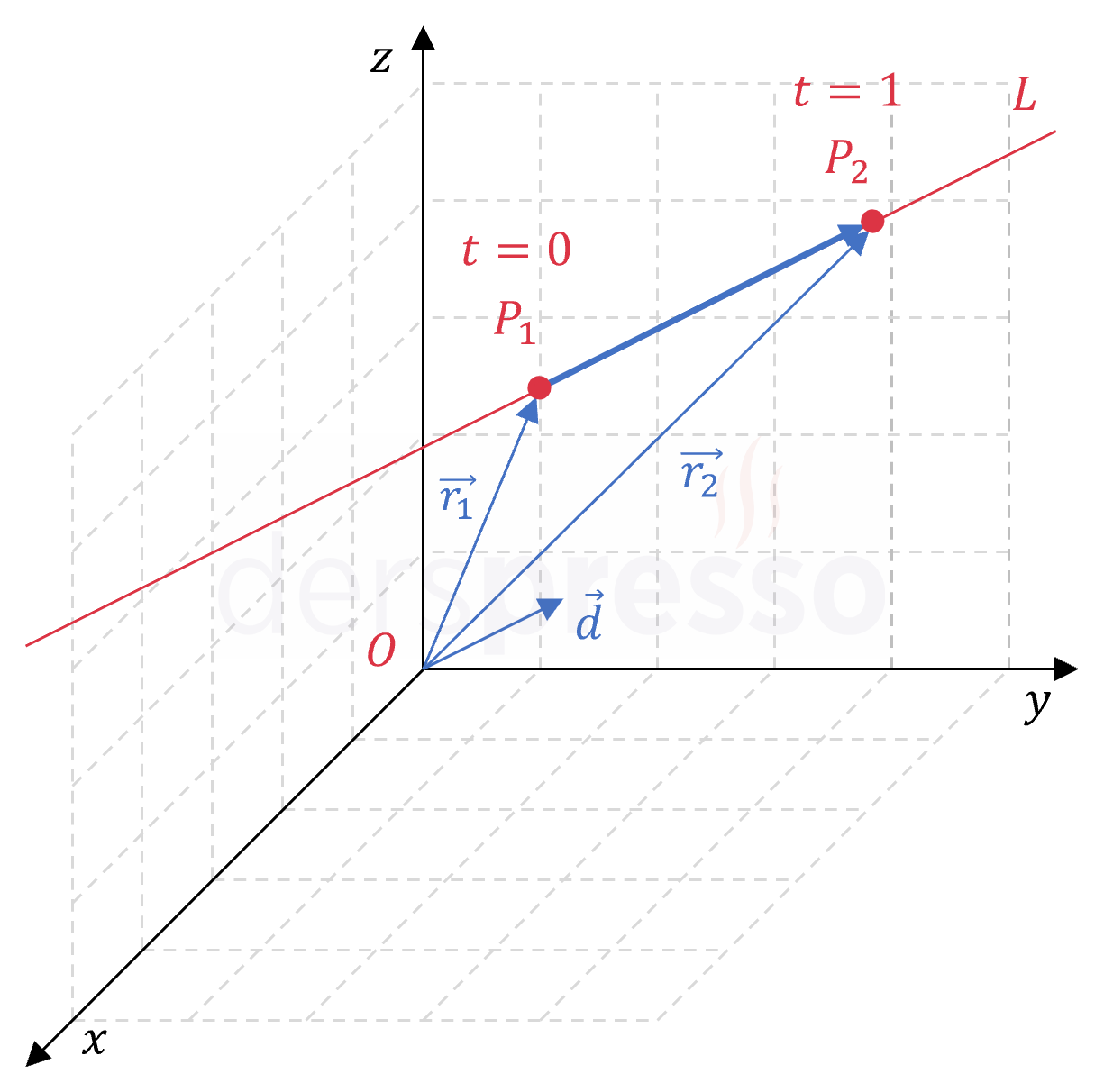
- Yukarı paylaştığımız yöntemle 2 noktası bilinen doğrunun denklemi bulunur.
- Bu denklem \( t \in \mathbb{R} \) için tüm doğrunun denklemini verirken \( t \in [0, 1] \) aralığı için \( [P_1P_2] \) doğru parçasının denklemini verir.
\( P_1(3, 1, -2) \) ve \( P_2(2, 4, 5) \) noktalarını birleştiren doğru parçasının denklemini bulalım.
Doğrunun doğrultman vektörü:
\( \vec{d} = \vec{P_1P_2} = P_2 - P_1 \)
\( = (2 - 3, 4 - 1, 5 - (-2)) \)
\( = (-1, 3, 7) \)
Doğrunun vektör denklemi:
\( \vec{r} = (3, 1, -2) + t(-1, 3, 7) \)
Bu doğru denklemi \( t \in [0, 1] \) aralığı için \( [P_1P_2] \) doğru parçasının denklemini verir.
Bu denklemin \( t = 0 \) değeri için \( P_1 \) noktasının, \( t = 1 \) değeri için de \( P_2 \) noktasının koordinatlarını verdiğini teyit edelim.
\( t = 0 \) için:
\( \vec{r_0} = (3, 1, -2) + 0(-1, 3, 7) \)
\( = (3, 1, -2) \)
\( t = 1 \) için:
\( \vec{r_1} = (3, 1, -2) + 1(-1, 3, 7) \)
\( = (2, 4, 5) \)
\( t \in (0, 1) \) açık aralığı da doğru parçası üzerinde \( P_1 \) ve \( P_2 \) noktaları arasında kalan noktaları verecektir.
\( m, n \in \mathbb{R} \) olmak üzere,
\( L \) doğrusu ile ilgili aşağıdaki bilgiler veriliyor.
\( P_1(1, -1, 4) \) ve \( P_2(7, m, n) \) noktaları \( L \) doğrusu üzerindedir.
\( L \) doğrusu \( \vec{d} = (3, 2, -5) \) vektörüne paraleldir.
Buna göre;
(a) \( L \) doğrusunun vektör denklemi nedir?
(b) \( m \) ve \( n \) kaçtır?
Çözümü Göster(a) seçeneği:
\( P_1(1, -1, 4) \) noktasından geçen ve \( \vec{d} = (3, 2, -5) \) vektörüne paralel olan doğrunun vektör denklemini bulalım.
\( t \in \mathbb{R} \) olmak üzere,
\( (x, y, z) = (x_0, y_0, z_0) + t(a, b, c) \)
\( (x, y, z) = (1, -1, 4) + t(3, 2, -5) \) bulunur.
(b) seçeneği:
\( P_2(7, m, n) \) noktasının \( L \) doğrusu üzerindedir.
Vektör denkleminde yerine koyalım.
\( (7, m, n) = (1, -1, 4) + t(3, 2, -5) \)
\( (7, m, n) = (1, -1, 4) + (3t, 2t, -5t) \)
\( (7, m, n) = (1 + 3t, -1 + 2t, 4 - 5t) \)
Eşit vektörlerin tüm bileşenleri birbirine eşittir.
\( 7 = 1 + 3t \)
\( t = 2 \)
\( t \) değerini denklemde yerine koyalım.
\( (7, m, n) = (1 + 3(2), -1 + 2(2), 4 - 5(2)) \)
\( (7, m, n) = (7, 3, -5) \)
\( m = 3 \) ve \( n = -5 \) bulunur.
\( n \in \mathbb{R} \) olmak üzere,
\( L \) doğrusu ile ilgili aşağıdaki bilgiler veriliyor.
\( P_1(0, 2, 8), P_2(-3, 5, 0) \) ve \( P_3(3, -1, n) \) noktaları \( L \) doğrusu üzerindedir.
Buna göre;
(a) \( L \) doğrusunun vektör denklemi nedir?
(b) \( n \) kaçtır?
Çözümü Göster(a) seçeneği:
Doğrunun doğrultman vektörü, doğru üzerindeki iki noktaya ait konum vektörlerinin farkı olan vektördür.
\( \vec{d} = \vec{OP_2} - \vec{OP_1} = \vec{P_{1}P_{2}} \)
\( = (-3, 5, 0) - (0, 2, 8) \)
\( = (-3, 3, -8) \)
\( P_1(0, 2, 8) \) noktasından geçen ve \( \vec{d} = (-3, 3, -8) \) vektörüne paralel olan doğrunun vektör denklemini bulalım.
\( t \in \mathbb{R} \) olmak üzere,
\( (x, y, z) = (x_0, y_0, z_0) + t(a, b, c) \)
\( (x, y, z) = (0, 2, 8) + t(-3, 3, -8) \) bulunur.
(b) seçeneği:
\( P_3(3, -1, n) \) noktası doğru üzerinde olduğuna göre, koordinatları doğrunun vektör denklemini sağlar.
Vektör denkleminde yerine koyalım.
\( (3, -1, n) = (0, 2, 8) + t(-3, 3, -8) \)
\( (3, -1, n) = (0, 2, 8) + (-3t, 3t, -8t) \)
\( (3, -1, n) = (-3t, 2 + 3t, 8 - 8t) \)
Eşit vektörlerin tüm bileşenleri birbirine eşittir.
\( 3 = -3t \)
\( t = -1 \)
\( t \) değerini denklemde yerine koyalım.
\( (3, -1, n) = (-3(-1), 2 + 3(-1), 8 - 8(-1)) \)
\( (3, -1, n) = (3, -1, 16) \)
\( n = 16 \) bulunur.
\( t, k \in \mathbb{R} \) olmak üzere,
\( L \) doğrusunun vektör denklemi aşağıda verilmiştir.
\( (x, y, z) = (0, 2, 8) + t(-10, 6, 20) \)
\( \vec{AB} = (-5, 2k - 7, 10) \)
\( L \) doğrusu \( \vec{AB} \) vektörüne paralel olduğuna göre, \( k \) kaçtır?
Çözümü Göster\( L \) doğrusunun vektör denklemi soruda verilmiştir.
\( (x, y, z) = (0, 2, 8) + t(-10, 6, 20) \)
Doğrunun, doğrultman vektörünü bulalım.
\( \vec{d} = (-10, 6, 20) \)
Doğrunun doğrultman vektörü doğruya paralel bir konum vektörüdür.
\( \vec{AB} \) vektörünün \( L \) doğrusuna paralel olduğu soruda verilmiştir.
Dolayısıyla, \( \vec{AB} \) vektörü \( \vec{d} \) doğrultman vektörüne de paraleldir.
\( \vec{AB} \parallel \vec{d} \)
Paralel iki vektörün bileşenlerinin oranı birbirine eşittir.
\( \dfrac{-10}{-5} = \dfrac{6}{2k - 7} = \dfrac{20}{10} \)
\( \dfrac{6}{2k - 7} = 2 \)
\( k = 5 \) bulunur.
\( L \) doğrusu ile ilgili aşağıdaki bilgiler veriliyor.
\( P_1(6, 3, 7), P_2(-2, -7, 9) \) ve \( P_3(x, y, z) \) noktaları \( L \) doğrusu üzerindedir.
\( P_2(x, y, z) \) noktası \( [P_{1}P_{3}] \) doğru parçası üzerindedir.
\( \norm{\vec{P_{1}P_{2}}} = 2\norm{\vec{P_{1}P_{3}}} \)
Buna göre;
(a) Doğrunun vektör denklemi nedir?
(b) \( P_3 \) noktasının koordinatları nedir?
Çözümü Göster\( \vec{OP_1}, \vec{OP_2} \) ve \( \vec{OP_3} \) konum vektörlerini tanımlayalım.
\( \vec{OP_1} = (6, 3, 7) \)
\( \vec{OP_2} = (-2, -7, 9) \)
\( \vec{OP_3} = (x, y, z) \)
(a) seçeneği:
Doğrunun doğrultman vektörünü bulalım.
Bu vektör doğru üzerinde iki noktaya ait konum vektörlerinin farkı olan vektördür.
\( \vec{d} = \vec{OP_2} - \vec{OP_1} = \vec{P_{1}P_{2}} \)
\( = (-2, -7, 9) - (6, 3, 7) \)
\( = (-8, -10, 2) \)
\( P_1(6, 3, 7) \) noktasından geçen ve \( \vec{d} = (-8, -10, 2) \) vektörüne paralel olan doğrunun vektör denklemini yazalım.
\( t \in \mathbb{R} \) olmak üzere,
\( (x, y, z) = (x_0, y_0, z_0) + t(a, b, c) \)
\( (x, y, z) = (6, 3, 7) + t(-8, -10, 2) \) bulunur.
(b) seçeneği:
\( P_2 \) noktasının \( [P_{1}P_{3}] \) doğru parçası üzerinde olduğu soruda verilmiştir.
\( \vec{P_{1}P_{2}} \) ve \( \vec{P_{1}P_{3}} \) aynı yönlü vektörlerdir, dolayısıyla normları arasındaki oran vektörler için de geçerlidir.
\( \norm{\vec{P_{1}P_{2}}} = 2\norm{\vec{P_{1}P_{3}}} \)
\( \vec{P_{1}P_{2}} = 2\vec{P_{1}P_{3}} \)
\( \vec{P_{1}P_{3}} \) vektörünü bulalım.
\( \vec{P_{1}P_{3}} \) vektörü başlangıç noktası \( P_1 \) ve bitiş noktası \( P_3 \) olan vektörü temsil eder.
\( \vec{P_{1}P_{3}} \) vektörü \( \vec{OP_3} \) konum vektöründen \( \vec{OP_1} \) konum vektörünün çıkarılması ile elde edilir.
\( \vec{P_{1}P_{3}} = \vec{OP_3} - \vec{OP_1} \)
İki vektör arasındaki çıkarma işleminde, vektörlerin bileşenlerinin ayrı ayrı farkı alınır.
\( = (x, y, z) - (6, 3, 7) \)
\( = (x - 6, y - 3, z - 7) \)
Verilen ve bulduğumuz değerleri eşitlikte yerine koyalım.
\( (-8, -10, 2) = 2(x - 6, y - 3, z - 7) \)
Bir vektörün bir skaler büyüklükle çarpımında, vektörün bileşenlerinin bu skaler büyüklükle çarpımı alınır.
\( (-8, -10, 2) = (2x - 12, 2y - 6, 2z - 14) \)
Eşit vektörlerin tüm bileşenleri birbirine eşittir.
\( -8 = 2x - 12 \)
\( x = 2 \)
\( -10 = 2y - 6 \)
\( y = -2 \)
\( 2 = 2z - 14 \)
\( z = 8 \)
\( \vec{P_1} = (x, y, z) = (2, -2, 8) \) bulunur.
\( t \in \mathbb{R} \) olmak üzere,
\( L \) doğrusunun vektör denklemi aşağıdaki gibidir.
\( (x, y, z) = (-2, 7, 5) + t(3, -2, -1) \)
\( A(1, 5, 4) \) ve \( B \) noktaları \( L \) doğrusu üzerindedir.
\( \norm{AB} = \sqrt{126} \)
Buna göre, \( B \) noktasının koordinatlarının alabileceği değerleri bulunuz.
Çözümü GösterDoğrunun vektör denklemini düzenleyelim.
\( (x, y, z) = (-2, 7, 5) + t(3, -2, -1) \)
\( = (3t - 2, -2t + 7, -t + 5) \)
\( B \) noktası \( L \) doğrusu üzerinde olduğuna göre, belirli bir \( t = k \) için koordinatları vektör denklemini sağlar.
\( k \in \mathbb{R} \) olmak üzere,
\( B(3k - 2, -2k + 7, -k + 5) \)
\( \vec{OA} \) ve \( \vec{OB} \) konum vektörlerini tanımlayalım.
\( \vec{OA} = (1, 5, 4) \)
\( \vec{OB} = (3k - 2, -2k + 7, -k + 5) \)
\( \vec{AB} \) vektörü başlangıç noktası \( A \) ve bitiş noktası \( B \) olan vektörü temsil eder.
\( \vec{AB} \) vektörü \( \vec{OB} \) konum vektöründen \( \vec{OA} \) konum vektörünün çıkarılması ile elde edilir.
\( \vec{AB} = \vec{OB} - \vec{OA} \)
\( = (3k - 2, -2k + 7, -k + 5) - (1, 5, 4) \)
\( = (3k - 3, -2k + 2, -k + 1) \)
\( \vec{AB} \) vektörünün normunu bulalım.
\( \norm{\vec{AB}} = \sqrt{(3k - 3)^2 + (-2k + 2)^2 + (-k + 1)^2} \)
\( = \sqrt{9k^2 - 18k + 9 + 4k^2 -8k + 4 + k^2 - 2k + 1} \)
\( = \sqrt{14k^2 - 28k + 14} \)
\( \norm{\vec{AB}} \) uzunluğu soruda verilmiştir.
\( \sqrt{14k^2 - 28k + 14} = \sqrt{126} \)
Eşitliğin taraflarının karesini alalım.
\( 14k^2 - 28k + 14 = 126 \)
\( 14k^2 - 28k - 112 = 0 \)
\( k^2 - 2k - 8 = 0 \)
\( (k + 2)(k - 4) = 0 \)
\( k \in \{ -2, 4 \} \)
\( k \) değerini \( B \) noktasında yerine koyalım.
\( k = -2 \) için:
\( B(3(-2) - 2, -2(-2) + 7, -(-2) + 5) \)
\( B(-8, 11, 7) \)
\( k = 4 \) için:
\( B(3(4) - 2, -2(4) + 7, -4 + 5) \)
\( B(10, -1, 1) \) bulunur.
\( O \) noktası orijin ve \( t \in \mathbb{R} \) olmak üzere,
\( L \) doğrusunun vektör denklemi aşağıdaki gibidir.
\( \vec{r} = (9, 6, 0) + t(4, 1, -2) \)
\( P \) noktası \( L \) doğrusu üzerindedir ve \( \vec{OP} \) vektörü \( L \) doğrusuna diktir.
Buna göre;
(a) \( P \) noktasının koordinatları nedir?
(b) \( \norm{\vec{OP}} \) uzunluğu nedir?
Çözümü Göster(a) seçeneği:
Vektör denklemini düzenleyelim.
\( \vec{r} = (9, 6, 0) + t(4, 1, -2) \)
\( = (4t + 9, t + 6, -2t) \)
\( \vec{OP} \) konum vektörünü tanımlayalım.
\( P \) noktası \( L \) doğrusu üzerinde olduğuna göre, belirli bir \( t = k \) için koordinatları vektör denklemini sağlar.
\( P(4k + 9, k + 6, -2k) \)
\( \vec{OP} = (4k + 9, k + 6, -2k) \)
\( \vec{OP} \) vektörünun \( L \) doğrusuna dik olduğu soruda verilmiştir.
Dolayısıyla \( \vec{OP} \), \( L \) doğrusunun doğrultman vektörü \( \vec{d} \) vektörüne de diktir.
Doğrunun doğrultman vektörünü bulalım.
\( \vec{d} = (4, 1, -2) \)
Birbirine dik olan vektörlerin nokta çarpımları 0'dır.
\( \vec{OP} \cdot \vec{d} = 0 \)
\( (4k + 9, k + 6, -2k) \cdot (4, 1, -2) = 0 \)
\( 4(4k + 9) + 1(k + 6) + (-2)(-2k) = 0 \)
\( 16k + 36 + k + 6 + 4k = 0 \)
\( k = -2 \)
Bulduğumuz \( k \) değerini \( P \) noktasında yerine koyalım.
\( P(4(-2) + 9, -2 + 6, -2(-2)) \)
\( P(1, 4, 4) \) bulunur.
(b) seçeneği:
\( \vec{OP} \) vektörünün normunu bulalım.
\( \norm{\vec{OP}} = \sqrt{1^2 + 4^2 + 4^2} \)
\( = \sqrt{33} \) bulunur.