Gauss - Jordan Eliminasyon Yöntemi
Önceki bölümde Gauss eliminasyon yönteminin ilk adımında artırılmış matrisi satır eşelon formuna getirmiş, ikinci adımda geriye doğru yerine koyma yöntemi ile sadeleştirilmiş lineer denklem sistemini cebirsel olarak çözmüştük.
Bu bölümde göreceğimiz Gauss - Jordan eliminasyon yöntemi (iki yöntemin isim benzerliğine dikkat ediniz!!!), Gauss eliminasyon yönteminin ikinci adımı yerine kullanılabilecek bir yöntemdir.
Gauss - Jordan eliminasyon yönteminin amacı, matrisi Gauss eliminasyon yöntemi ile elde edilen satır eşelon formundan indirgenmiş satır eşelon formuna getirmektir. İndirgenmiş satır eşelon formundaki bir matris hiçbir ek işlem gerektirmeden lineer denklem sisteminin çözümünü verir.
İndirgenmiş Satır Eşelon Formu
İndirgenmiş satır eşelon formundaki bir matris, satır eşelon formunun sağladığı koşullara ek olarak aşağıdaki iki koşulu sağlar.
- Matrisin tüm pivotları 1'dir.
- Bir pivotun aynı sütunda ve üstünde bulunan elemanlar sıfırdır (pivotların altındaki elemanların sıfır olma koşulunun satır eşelon formu için geçerli olduğunu hatırlatalım).
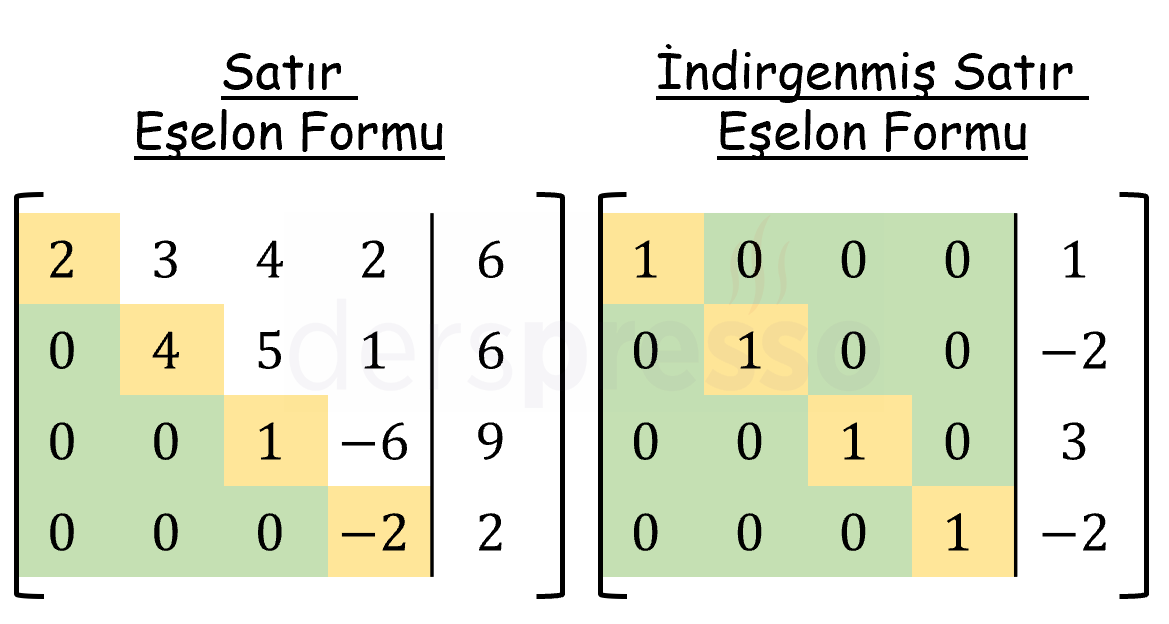
Aşağıda indirgenmiş satır eşelon formunda bir matris satır eşelon formu ile karşılaştırmalı olarak verilmiştir. Görülebileceği gibi, indirgenmiş satır eşelon formundaki bir matriste tüm pivotlar 1'dir ve sadece pivotların altındaki elemanlar değil, üstündeki elemanlar da sıfırdır.
Not: Bazı kaynaklarda pivotların 1 olmasının indirgenmiş satır eşelon formunun değil, satır eşelon formunun bir koşulu olarak geçtiği görülebilir. Koşulların bu şekilde kabul edilmesi elde edilecek nihai çözüm kümesini değiştirmeyecektir.
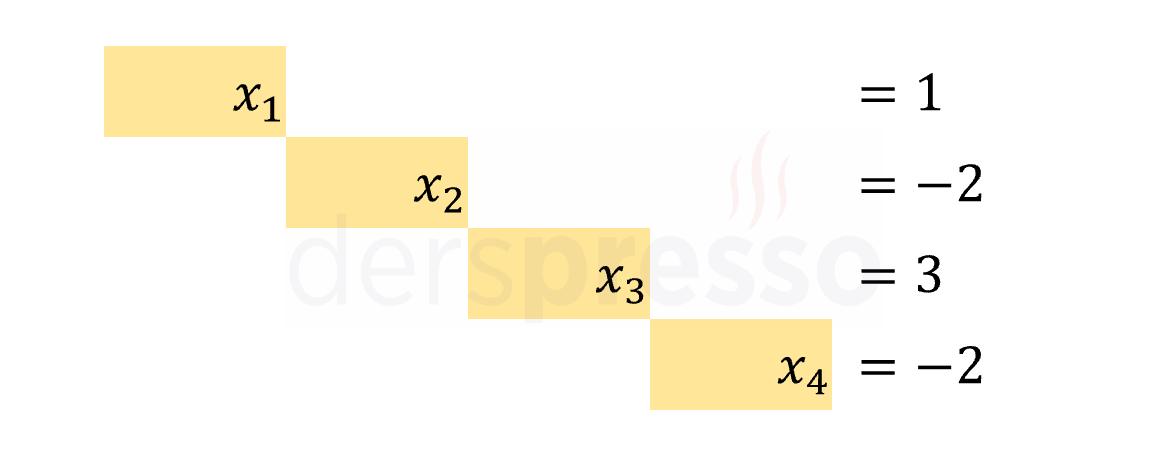
İndirgenmiş satır eşelon formundaki bir matrisin denklem sistemi şeklinde yazılışını incelediğimizde, sistemin hiçbir ek işleme gerek kalmadan değişkenlerin çözüm değerlerini verdiği görülebilir.
Matrisi İndirgenmiş Satır Eşelon Formuna Getirme
Gauss eliminasyon yöntemi ile satır eşelon formuna getirilen bir matris, indirgenmiş satır eşelon formuna aşağıdaki adımlar takip edilerek getirilebilir.
- Tüm pivotlar çarpma satır işlemi ile 1'e eşitlenir.
- Matriste en sağdaki sütundaki pivotun aynı sütunda ve üstünde bulunan sıfırdan farklı elemanlar toplama satır işlemleri ile sıfıra eşitlenir.
- Yukarıdaki 2. adım sola doğru pivotu olan her sütun için tekrarlanır.
Şimdi bu yöntemi Gauss eliminasyon yöntemi konusundaki örnekte elde ettiğimiz satır eşelon formundaki matrise uygulayalım.
| İşlem | Denklem Sistemi |
|---|---|
|
Gauss eliminasyon yöntemi ile elde ettiğimiz satır eşelon formundaki matrisi yazalım. |
\( \left[ \begin{array}{cccc|c} \color{red}{-1} & -2 & -4 & 2 & 29 \\ 0 & \color{red}{8} & 18 & -11 & -116 \\ 0 & 0 & \color{red}{-3} & 1 & 23 \\ 0 & 0 & 0 & \color{red}{\frac{9}{2}} & 9 \end{array} \right] \) |
|
1'den farklı olan pivotları çarpma satır işlemi ile 1'e eşitleyelim. \( -R_1 \rightarrow R_1 \) \( \dfrac{1}{8}R_2 \rightarrow R_2 \) \( -\dfrac{1}{3}R_3 \rightarrow R_3 \) \( \dfrac{2}{9}R_4 \rightarrow R_4 \) |
\( \left[ \begin{array}{cccc|c} \color{red}{1} & 2 & 4 & -2 & -29 \\ 0 & \color{red}{1} & \frac{9}{4} & -\frac{11}{8} & -\frac{29}{2} \\ 0 & 0 & \color{red}{1} & -\frac{1}{3} & -\frac{23}{3} \\ 0 & 0 & 0 & \color{red}{1} & 2 \end{array} \right] \) |
|
Dördüncü sütunun pivotuyla (\( a_{44} \)) aynı sütunda ve üstünde bulunan sıfırdan farklı elemanları toplama satır işlemleri ile sıfıra eşitleyelim. \( 2R_4 + R_1 \rightarrow R_1 \) \( \dfrac{11}{8}R_4 + R_2 \rightarrow R_2 \) \( \dfrac{1}{3}R_4 + R_3 \rightarrow R_3 \) Bu işlemler sonucunda dördüncü sütun istediğimiz forma gelmiş oldu. İşleme sola doğru pivotu olan ilk sütun ile devam edelim. |
\( \left[ \begin{array}{cccc|c} \color{red}{1} & 2 & 4 & 0 & -25 \\ 0 & \color{red}{1} & \frac{9}{4} & 0 & -\frac{47}{4} \\ 0 & 0 & \color{red}{1} & 0 & -7 \\ 0 & 0 & 0 & \color{red}{1} & 2 \end{array} \right] \) |
|
Üçüncü sütunun pivotuyla (\( a_{33} \)) aynı sütunda ve üstünde bulunan sıfırdan farklı elemanları toplama satır işlemleri ile sıfıra eşitleyelim. \( -4R_3 + R_1 \rightarrow R_1 \) \( -\dfrac{9}{4}R_3 + R_2 \rightarrow R_2 \) Bu işlemler sonucunda üçüncü sütun istediğimiz forma gelmiş oldu. İşleme sola doğru pivotu olan ilk sütun ile devam edelim. |
\( \left[ \begin{array}{cccc|c} \color{red}{1} & 2 & 0 & 0 & 3 \\ 0 & \color{red}{1} & 0 & 0 & 4 \\ 0 & 0 & \color{red}{1} & 0 & -7 \\ 0 & 0 & 0 & \color{red}{1} & 2 \end{array} \right] \) |
|
İkinci sütunun pivotuyla (\( a_{22} \)) aynı sütunda ve üstünde bulunan sıfırdan farklı elemanları toplama satır işlemleri ile sıfıra eşitleyelim. \( -2R_2 + R_1 \rightarrow R_1 \) Bu işlemler sonucunda ikinci sütun istediğimiz forma gelmiş oldu. Tüm pivotların üzerinden geçtiğimiz için işlem tamamlanmıştır. Elde ettiğimiz matris indirgenmiş satır eşelon formundadır. |
\( \left[ \begin{array}{cccc|c} \color{red}{1} & 0 & 0 & 0 & -5 \\ 0 & \color{red}{1} & 0 & 0 & 4 \\ 0 & 0 & \color{red}{1} & 0 & -7 \\ 0 & 0 & 0 & \color{red}{1} & 2 \end{array} \right] \) |
Çözüm Kümesini Bulma
Elde ettiğimiz satır eşelon formundaki matrisi denklem sistemi şeklinde yazalım.
\( \begin{array}{rrrrcl} x_1 & & & & = & -5 \\ & x_2 & & & = & 4 \\ & & x_3 & & = & -7 \\ & & & x_4 & = & 2 \end{array} \)
Satır eşelon formundan farklı olarak, indirgenmiş satır eşelon formundaki bir matris hiçbir ek işleme gerek kalmadan denklem sisteminin çözüm kümesini verir.
\( x_1 = -5 \)
\( x_2 = 4 \)
\( x_3 = -7 \)
\( x_4 = 2 \)
Buna göre lineer denklem sisteminin tek çözümü Gauss eliminasyon yöntemi ile bulduğumuz çözümle aynı şekilde \( (x_1, x_2, x_3, x_4) = (-5, 4, -7, 2) \) olarak bulunur.